Podsumowanie
MCHTR-PPW
Podsumowanie
MCHTR-PPW
Twój wynik
Wszystkie ({{dataStorage.userResults.answersTotal}})
Prawidłowe ({{dataStorage.userResults.answersGood}})
Do powtórki ({{dataStorage.userResults.answersRepeat}})
Błędne ({{dataStorage.userResults.answersBad}})
Pytanie 1
Najbardziej typowe zastosowania przetworników inkrementalnych pojemnościowych to
mikroskopy i projektory
suwmiarki
obrabiarki
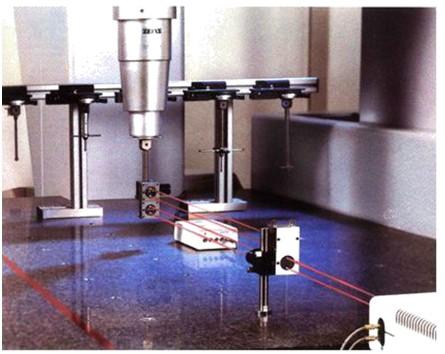
współrzędnościowe maszyny pomiarowe
Pytanie 2
W metodzie rozogniskowania wykorzystuje się
astygmatyzm
achromatyzm
kolimację wiązki
Pytanie 3
Niedokładność pomiaru interferometrycznego długości w przeważającej mierze zależy od
niedokładności wyznaczenia długości fali światła w próżni użytego lasera
niedokładności interpolacji sygnałów wyjściowych interferometru
niedokładności wyznaczenia temperatury, ciśnienia i wilgotności powietrza
niestabilności częstotliwości promieniowania użytego lasera
Pytanie 4
Który pomiar jest dokładniejszy
punktowy
skaningowy
Pytanie 5
Najmniejszy okres wzorców stosowanych w przetwornikach inkrementalnych z czytnikiem interferencyjnym to ok
0,5 - 1 µm
1 - 10 µm
10 - 100 µm
0,1 - 0,5 µm
Pytanie 6
Absolutne pomiary długości umożliwiają wzorce
kodowe
magnetyczne
induktosynowe
Pytanie 7
Jakie łożyskowanie występuje w układach przesuwnych WMP?:
toczne
aerostatyczne
ślizgowe
Pytanie 8
Z jakiej minimalnej liczby punktów można wyznaczyć wymiary elementu walcowego (nie mylić z matematyczną liczbą punktów)?
6
8
2
4
Pytanie 9
Wykorzystując metodę rozogniskowania w momencie zogniskowania wiązki laserowej na powierzchni testowanej plamka świetlna od niej odbitego wytworzona na fotodiodzie kwadrantowej:
jest kołowa
znajduje się w jej środku
ma największą moc
Pytanie 10
Maszyna o zakresie pomiarowym 12m to maszyna konstrukcji
mostowej
wysięgnikowej
portalowej
wspornikowej
Pytanie 11
Sygnał z głowicy impulsowej w pomiarach współrzędnościowych powoduje w pierwszej kolejności
zatrzymanie ruchów układów przesuwnych maszyny
odczytanie współrzędnych lokalizowanego punktu
zmianę kierunku ruchów układów przesuwnych
Pytanie 12
Wymiar obiektu wyznaczony metodą cienia z wykorzystaniem detektora PSD wyznaczony jest w postaci
czasu przesunięcia fotodetektora
przemieszczenia skanera
różnicy napięć fotodetektora
Pytanie 13
Maksymalne zakresy pomiarowe przetworników inkrementalnych pojemnościowych są rzędu
2000 mm
100 mm
10 mm
Pytanie 14
Okres prążków Mory zależy od
kąta pochylenia linii wzorca i przeciw-wzorca
różnicy okresów wzorca i przeciw-wzorca
pozostałe odpowiedzi
Pytanie 15
Spełnienie zasady Abbego w pomiarach przemieszczeń (długości) konieczne jest ze względu na
tzw. błąd kosinusowy
niedokładności prowadzenia ruchomego elementu w trakcie pomiaru
pozostałe odpowiedzi
niepokrywanie się kątowe osi wzorca i osi pomiaru
Pytanie 16
Który zapis błędu granicznego, dopuszczalnego maszyny pomiarowej jest prawidłowy
MPEE=±(A+L/K)
GX=QX+SXLX
U=A+KL
Pytanie 17
Wartość tzw. błędu kosinusowego pomiaru przemieszczeń (długości) jest
zmienia się zgodnie z funkcją kosinusa kąta odchylenia ruchomego elementu od osi prowadnicy
odwrotnie proporcjonalna do mierzonego przemieszczenia
wprost proporcjonalna do mierzonego przemieszczenia
Pytanie 18
Najbardziej typowe zastosowania przetworników induktosynowych to
mikroskopy i projektory
suwmiarki elektroniczne
współrzędnościowe maszyny pomiarowe
obrabiarki
Pytanie 19
Czy wyznaczenie odległości osi dwóch otworów jest procedurą
obliczeniową
pomiarową
Pytanie 20
Podstawowym typem reflektora interferometru jest naroże sześcianu ze względu na fakt, że
występują najmniejsze straty przy odbiciu od tego typu reflektora
nie występuje konieczność adjustacji kątowej reflektora
uzyskuje się najwyższą rozdzielczość układu interferometrycznego
Pytanie 21
Jakiej konstrukcji maszyny stosuje się do pomiarów karoserii samochodowych?:
portalowe
wysięgnikowe (kolumnowe)
mostowe
wspornikowe
Pytanie 22
Ile wyprowadzeń posiada liniowy fotodetektor PSD?
4
2
5
3
Pytanie 23
Metoda triangulacji laserowej przeznaczone jest do ustalania zmian położenia głównie powierzchni
jasnych (np. białych)
rozpraszających światło (matowych)
refleksyjnych (zwierciadlanych)
Pytanie 24
Metoda triangulacji laserowej przeznaczone jest do ustalania zmian położenia głównie powierzchni
prawda
fałsz
Pytanie 25
Pulpit operatora maszyny pomiarowej służy do
wykonywania obliczeń
wykonywania przemieszczeń członów ruchowych maszyny
uruchamiania programu
Pytanie 26
Orientacyjna rozdzielczość przetwornika induktosynowego to
0,2 µm
20 µm
2 µm
Pytanie 27
Minimalna liczba punktów niezbędnych do wyznaczenia średnicy otworu na WMP to
4
2
8
6
Pytanie 28
Technika rzutowania siatki jest w swoich podstawach teoretycznych odmianą metody
prążków mory
triangulacji laserowej
projektowej
cienia
Pytanie 29
Dopuszczalna minimalna odległość do obiektu mierzonego dalmierzem zależy od
wielkości obiektu
czasu trwania impulsu świetlnego
refleksyjności obiektu
Pytanie 30
Która głowica pomiarowa jest dokładniejsza?
bezstykowa triangulacyjna
stykowa impulsowa
Pytanie 31
Kalibracje głowic pomiarowych przeprowadza się
poprzez pomiary mikrometrem
na płytkach wzorcowych
poprzez pomiar czujnikiem
na kuli wzorcowej
Pytanie 32
Zakres pomiarowy typowego interferometru laserowego może sięgać
10 m
1000 m
100 m
1 m
Pytanie 33
Ile układów pomiarowych długości jest we współrzędnościowej maszynie pomiarowej?
2
1
3
4
Pytanie 34
Orientacyjna rozdzielczość przetw. inkrementalnego pojemnościowego to
1 µm
100 µm
0,1 µm
Pytanie 35
Wpływ ustawienia fotodetektorów względem prążków mory jest zredukowany poprzez zastosowanie
czterech siatek przeciw-wzorca o równoległych liniach
czterech siatek przeciw-wzorca o różnych okresach
czterech siatek przeciw-wzorca o równoległych liniach i przesuniętych fazowo
wzorca i przeciw wzorca o tym samym okresie linii
Pytanie 36
Typowa względna niedokładność pomiaru długości komercyjnym interferometrem pomiarowym wynosi ok.
1 e-5
1 e-6
1 e-7
1 e-8
Pytanie 37
Jakiej konstrukcji maszyna pomiarowa może być zastosowana, gdy wymiary przedmiotu nie przekraczają 350 mm?
wysięgnikowa
wspornikowa
mostowa
Pytanie 38
Rozdzielczość i dokładność kątowa obrotowych enkoderów magnetycznych sięga rzędu pojedynczych kątowych
sekund
minut
stopni
Pytanie 39
Która z poniżej wymienionych czynności powinna znaleźć się na pierwszym miejscu kolejności realizacji
Ustalenie układu współrzędnych przedmiotu
Procedury obliczeniowe i statystyczne
Pomiar poszczególnych figur geometrycznych
Uzbrojenie głowicy w konfigurację trzpieni
Pytanie 40
Przypadki regularne błędów okrągłości takie jak owalność czy ogólne n-graniastość pozwalają na prosty pomiar czujnikowy wartości odchyłki okrągłości metodą
odniesieniowa
bezodniesieniowa
Pytanie 41
Przy nieruchomym położeniu reflektorów interferometru dwuczęstotliwościowego prążki interferometryczne
pozostają nieruchome
przemieszczają się
przemieszczają się tylko przy zmienia jednej częstotliwości lasera na drugą
Pytanie 42
Dalmierze laserowe wykorzystują
pomiar energii wiązki odbitej od obiektu
technikę triangulacji laserowej
pomiar czasu biegu wiązki światła
zjawisko interferencji
Pytanie 43
W metodzie interferencyjnej pomiar chropowatości lub niepłaskości wartości mierzonej odchyłki (parametru) jest proporcjonalna do
okresu obserwowanych prążków interferencyjnych
okresu obserwowanych prążków interferencyjnych jednej barwy
stosunku deformacji prążka interf. do okresu obserwowanych prążków
Pytanie 44
Orientacja rozdzielczości laserowej głowicy triangulacyjnej to
0,1 mm
0,001 mm
0,00001 mm
Pytanie 45
Typowa niedokładność głowicy elektrostatycznej WMP wynosi
1 µm
0,1 µm
0,05 µm
10 µm
Pytanie 46
Typowa dokładność laserowej głowicy triangulacyjnej to
0,001 mm
0,01 mm
0,0001 mm
Pytanie 47
Typowa rozdzielczość liniowych przetworników inkrementalnych z czytnikiem interferencyjnym wynosi ok.
1 µm
0,1 µm
0,01 µm
0,001 µm
Pytanie 48
Najmniejszy okres wzorców stosowanych w przetwornikach inkrementalnych wykorzystujących efekt mory to ok.
0,1 µm
1 µm
10 µm
100 µm
Pytanie 49
Maksymalna rozdzielczość metody rozogniskowania sięga
1000 nm
1 nm
10 nm
100 nm
Pytanie 50
Maksymalna rozdzielczość przetworników pojemnościowych sięga ok.
0,01 pm
0,01 µm
0,01 mm
0,01 nm
Pytanie 51
Typowa niedokładność elektrostykowej głowicy WMP wynosi:
10^-3 mm
10^-4 mm
10^-2 mm
10^-1 mm
Pytanie 52
Wraz ze wzrostem refleksyjności powierzchni oświetlanej czułość układu triangulacji laserowej:
maleje
rośnie
nie zmienia się
Pytanie 53
Przy laserowym bezstykowym pomiarze średnicy (ok. 10 mm) ciągnionego pręta aluminiowego miarą średnicy jest:
różnica dwóch napięć
czas
napięcie
liczba impulsów
Pytanie 54
W urządzeniu, którego schemat pokazano na rysunku, jeżeli powierzchnia 1 przemieści się do góry to plamka świetlna w płaszczyźnie fotodetektora:
przemieści się w prawo
przemieści się w lewo
rozciągnie się wzdłuż fotodetektora
rozciągnie się w poprzek fotodetektora

Pytanie 55
Pomiar prostoliniowości lub płaskości z wykorzystaniem interferometru do pomiarów kątów wymaga użycia w obliczeniach następującej liczby parametrów geometrycznych zespołu ruchomego interferometru:
0
2
1
3
Pytanie 56
Pomiar odchyłki okrągłości wału okrętowego o średnicy 1m możliwy jest przy użyciu metody:
bezodniesieniowej
zarówno bezodniesieniowej jak i odniesieniowej
odniesieniowej
Pytanie 57
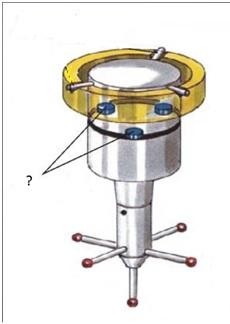
Liczba przetworników znajdujących się w głowicy pokazanej na rysunku to:
4
3
1
6

Pytanie 58
Największe zakresy pomiarowe przetworników inkrementalnych pojemnościowych spotyka się w:
współrzędnościowych maszynach pomiarowych
wysokościomierzach
obrabiarkach
mikroskopach i projektorach
Pytanie 59
Rysunek przedstawia końcówkę pomiarową mikroskopu sił atomowych. Widoczna w dolnej części biała linia skali reprezentuje:
0,1 mm
1 mm
0,001 mm
0,01 mm

Pytanie 60
Czas stabilizacji czujnika pneumatycznego wynosi ok.
0,1s
1s
0,001s
0,01s
Pytanie 61
Wybór układu współrzędnych przedmiotu wymaga dokonania pomiaru na przedmiocie
trzech osi
trzech niewspółosiowych punktów
jednej płaszczyzny, jednej osi i jednego punktu
trzech płaszczyzn
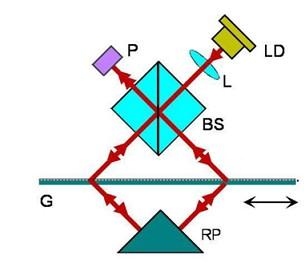
Pytanie 62
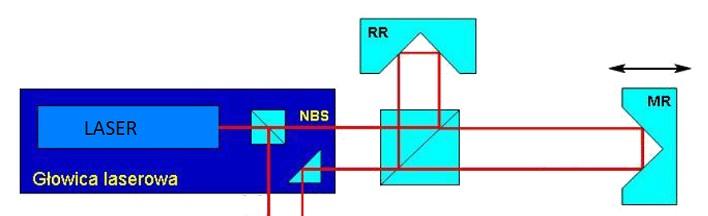
Przedstawiony na rysunku schemat dotyczy interferometru laserowego
zarówno jedno jak i dwuczęstotliwościowego
dwuczęstotliwościowego
jednoczęstotliwościowego

Pytanie 63
Rozdzielczość typowych przetworników inkrementalnych z czujnikiem interferencyjnym najczęściej mieści się w granicach:
100-1000 nm
0,1-1 nm
10-100 nm
1-10 nm
Pytanie 64
W układzie triangulacji laserowej jeżeli kąt padania wiązki na powierzchnię mierzoną jest ustalony to ma najczęściej następującą wartość:
mieści się w granicach od 10 do 30 st.
wynosi 45 st.
równa się kątowi odbicia
wynosi 0 st.
Pytanie 65
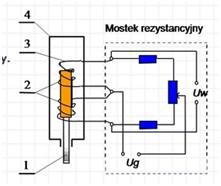
W układzie elektronicznym czujnika indukcyjnego wykonywany jest pomiar:
impedancji
napięcia stałego
napięcia zmiennego
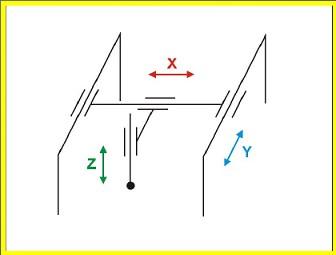
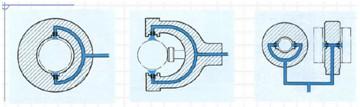
Pytanie 66
Na podanym schemacie przedstawiona została maszyna o konstrukcji:
wysięgnikowej
portalowej
wspornikowej
mostowej
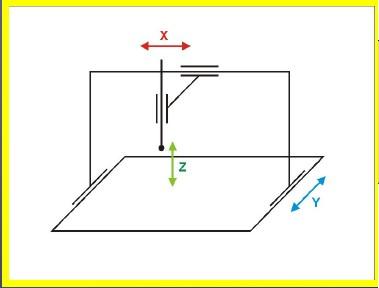
Pytanie 67
Na podanym schemacie przedstawiona została maszyna o konstrukcji:
portalowej
wysięgnikowej
wspornikowej
mostowej
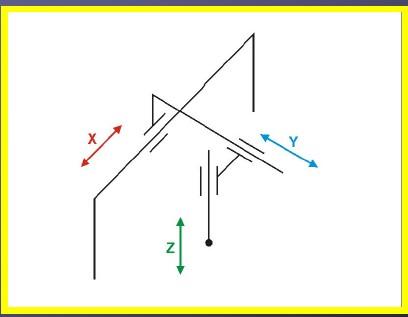
Pytanie 68
Na podanym schemacie przedstawiona została maszyna o konstrukcji:
wspornikowej
portalowej
mostowej
wysięgnikowej
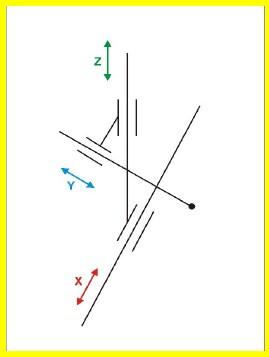
Pytanie 69
Na podanym schemacie przedstawiona została maszyna o konstrukcji:
wspornikowej
mostowej
portalowej
wysięgnikowej
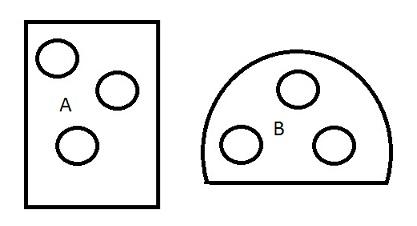
Pytanie 70
Czy w podanym elemencie można dokonać pomiaru odległości środków otworów przy wykorzystaniu wysokościomierza?
Tylko w elemencie B
W żadnym z elementów
W obu elementach
Tylko w elemencie A
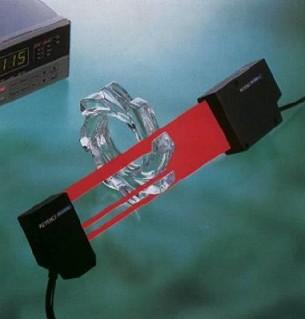
Pytanie 71
Urządzenie to wykorzystuję metodę:
triangulacji laserowej
rozogniskowania
rzutowania siatki
cienia
Pytanie 72
Jakie rzędy interferują tutaj ze sobą:
-1-1 i +1+1
-1 i +1
-1+1 i +1-1
+1-1 i -1+1
Pytanie 73
Jakie słowo najlepiej opisuje to, co widzisz:
średnica
pasowanie
smarowanie
pierścień
Pytanie 74
Jaki pomiar się tutaj dokonuje:
przesunięcia liniowego
kołysania
prostoliniowości
prostopadłości
Pytanie 75
W przedstawionym (układzie/czujniku?) U2 (w miejscu Uw) jest napięciem:
wejściowym zmiennym
wejściowym stałym
wyjściowym zmiennym
wyjściowym stałym
Pytanie 76
Która z metod nie pasuje do reszty:
metoda triangulacji laserowej
metoda rzutowanej siatki
metoda cienia
metoda skanowania linii
Pytanie 77
Pomiar z rozogniskowaniem (cholera wie czym) będzie miał podobną dokładność(?) jak pomiar metoda stykową po
polerowaniu
obróbce elektroerozyjnej
szlifowaniu
Pytanie 78
Przedstawiony na rysunku schemat dotyczy interferometru laserowego
jednoczęstotliwościowego
zarówno jedno jak i dwuczęstotliwościowego
dwuczęstotliwościowego
Pytanie 79
Rozdzielczość metody rozogniskowania sięga:
500 nm
50 nm
5000 nm
Pytanie 80
Na podstawie pomiaru dwóch powierzchni sferycznych na maszynie współrzędnościowej można wyznaczyć:
2 osie
3 osie
1 oś
4 osie
Pytanie 81
Układ do pomiaru mikrowłókien metodą cieni wykorzystuje:
fotolinijkę
zwykłą fotodiodę
fotodiodę kwadrantową
Pytanie 82
Co przedstawia element zaznaczony na obrazku:
elektrostyki mechaniczne
czujniki indukcyjne
elementy piezoelektryczne
Pytanie 83
Trakery laserowe – ile układów pomiarowych do pomiaru odległości liniowej
4
2
1
3
Pytanie 84
Trakery laserowe – ile układów do pomiarów przesunięcia kątowego
3
1
2
4
Pytanie 85
Trakery laserowe – ile reflektorów mogą śledzić
3
2
1
wiele
Pytanie 86
Przyczyna błędu kosinusowego w interferometrach
nierównoległość wiązki pomiarowej i osi pomiarowej
niedokładności pomiarów warunków otoczenia
niedokładności pomiaru częstotliwości wiązki
Pytanie 87
Jaki to typ maszyny?
mostowa
bramowa
wspornikowa
hybrydowa

Pytanie 88
Jaki to typ maszyny?
mostowa
wspornikowa
bramowa
hybrydowa

Pytanie 89
W którym przetworniku pomiarowym kontaktowym do pomiaru mikrogeometrii dźwignia NIE obraca się wokół ustalonej osi
interferometryczny
indukcyjny
piezoelektryczny
Pytanie 90
Nowe mikroskopy umożliwiają pomiar
XY
tylko mikrogeometrii
XYZ
Pytanie 91
Czy enkodery magnetyczne mogą dokonywać pomiarów absolutnych
Nie
Tak
Pytanie 92
Który z podanych przetworników może być absolutny
pojemnościowy
triangulacyjny
indukcyjny
Pytanie 93
Cechy charakterystyczne wzorca magnetycznego
pomiar absolutny
mała prędkość pomiarowa
z odpornością na trudne warunki
Pytanie 94
Ile maksymalnie układów pomiarowych ma maszyna współrzędnościowa
6
4
3
Pytanie 95
Czy jeżeli (…) nie spełnia zasady Abbego to zgodnie z tą zasadą możemy wyeliminować błąd?
prawda
fałsz
Pytanie 96
Ile siatek tworzy przeciw-wzorzec przy pomiarze prążków mory
3
1
0
2
Pytanie 97
Jaką lampą RTG prześwietlimy żeliwny blok silnika czterotłokowego?
180kV
450kV
120kV
Pytanie 98
W jakiej metodzie stosujemy spektrometr?
triangulacji
cienia
rzutowania siatki
rozogniskowania
Pytanie 99
Orientacyjna wartość działki elementarnej czujnika dźwigniowo zębatego to
0,01 mm
0,001 mm
0,1 mm
Pytanie 100
Orientacyjna wartość zakresu pomiarowego czujnika zegarowego to
od 0,03 do 0,1 mm
od 3 do 10 mm
od 0,3 do 1 mm
od 30 do 100 mm
Pytanie 101
Orientacyjna wartość zakresu pomiarowego czujnika dźwigniowo-zębatego to
±0,1 mm
±1 mm
±0,001 mm
±0,010 mm
Pytanie 102
Orientacja dokładności czujnika zegarowego to
±0,005 mm
±0,050 mm
±0,500 mm
Pytanie 103
Orientacyjna wartość działki elementarnej czujnika zegarowego to
0,01 mm
0,1 mm
0,001 mm