Wyszukaj
Zaloguj / zarejestruj się
Jeśli masz już konto, możesz się zalogować.
Jeśli nie masz konta, zarejestruj nowe podając nazwę użytkownika, adres email i hasło.
Formularz kontaktowy
Memorizer+
Wykup dostęp
Ta funkcja jest dostępna dla użytkowników, którzy wykupili plan Memorizer+

Pytania i odpowiedzi
Elektronika przemysłowa
Zebrane pytania i odpowiedzi do zestawu. I tak nie zdamy
Ilość pytań: 75 Rozwiązywany: 4500 razy
Pytanie 21
21. W transformatorze zasilającym zastosowano niezwarty zwój z folii miedzianej w celu:
zmniejszenia zakłóceń sieciowych poprzez wprowadzenie ekranu elektrostatycznego,
zmiany pojemności między uzwojeniami transformatora przy ekranowaniu urządzenia elektronicznego
Pytanie 22
22. W celu zabezpieczenia styku przed dużymi prądami udarowymi (np. przy obciążeniu pojemnościowym) należy zastosować:
przełączalny rezystor ograniczający prąd,
Pytanie 23
23. W celu zabezpieczenia styku stosujemy:
układ RCD przy obciążeniu indukcyjnym pobierającym prąd większy niż prąd łuku,
nie jest wymagane zabezpieczenie styku przy obciążeniu nieindukcyjnym pobierającym prąd mniejszy niż prąd łuku,
Pytanie 24
24. Rezolwer jest przetwornikiem:
zwanym inaczej transformatorem położenia,
położenia absolutnego i prędkości kątowej
elektromechanicznym stosowanym m. in. w serwosilnikach
Pytanie 25
25. Transoptor liniowy:
działa w oparciu o diodę LED oraz fotodiodę sprzężenia zwrotnego i fotodiodę wyjściową,
Pytanie 26
26. Serwonapęd przeznaczony jest zwłaszcza do:
urządzeń automatyki o dużej dynamice ruchu,
pracy przerywanej,
Pytanie 27
27. Jakość pracy serwonapędu zwiększamy poprzez:
odpowiednie nastawy filtrów redukujących wpływ rezonansu mechanicznego,
zadawanie według krzywej „S”,
Pytanie 28
28. W nowoczesnych obrabiarkach CNC stosujemy:
serwonapędy z regulatorami ze sprzężeniem w przód,
serwonapędy z regulacją położenia, prędkości przyspieszenia i udaru,
interpolację funkcjami sklejanymi,
Pytanie 29
29. Sieć komputerowa napędów sterowanych zazwyczaj zawiera:
specjalizowane interfejsy o szybkości transmisji rzędu 1Mbps.
Pytanie 30
30. W układach pomiaru położenia stosujemy optoelektroniczne przetworniki przyrostowe, gdyż:
mikrokontrolery posiadają odpowiednie interfejsy (liczniki),
multiplikacja sygnałów zwiększa dokładność pomiaru.
Pytanie 31
31. W układzie pomiaru położenia urządzenia technologicznego zastosowano przetworniki: absolutny i przyrostowy. Podczas ruchu urządzenia nastąpił zanik napięcia zasilającego enkodery. Jakie układy pomiarowe będą – po powrocie zasilania - prawidłowo wskazywały położenie:
tylko układ z enkoderem absolutnym,
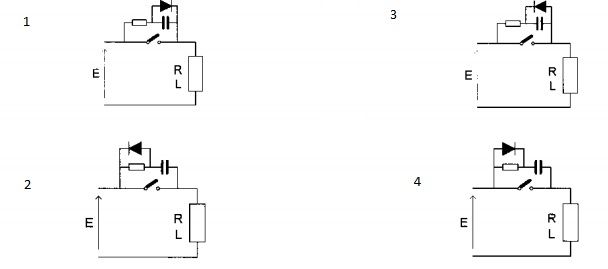
Pytanie 32
32. Który z układów charakteryzuje się największą skutecznością ochrony styku:
4
Pytanie 33
33. Które z sygnałów przedstawionych na rysunku są właściwymi przebiegami wyjściowymi A, B przetwornika obrotowo-impulsowego:
1
4

Pytanie 34
34. Dlaczego w serwonapędach stosujemy swobodnie programowalne układy wejścia/wyjścia:
umożliwiają budowę sterownika urządzenia technologicznego,
obsługują układy sprzężeń zwrotnych serwonapędu,
umożliwiają pracę serwonapędu w układach wielonapędowych
Pytanie 35
35. Jaką można przyjąć szybkość szeregowej transmisji danych do 4 serwonapędów połączonych w sieci pierścieniowej, jeżeli cykl zadawania położenia dla każdego z napędów wynosi 0,5 ms a informacja o położeniu wymaga przesłania 4 bajtów danych (odpowiedź uzasadnić): Uzasadnienie: 4 bajty danych zadawania położenia i 4 bajty danych odpowiedzi daje 8 bajtów na jeden pełny cykl Mamy 4 serwonapędy i jeden pełny cykl trwa 500us (0.5ms) więc 8*4/500u=64000bajty/sekunde 1 bajt=8 bitów, więc 64000*8=512bitow/s=0,5 Mb/s
1 Mb/s
0,5 Mb/s
Pytanie 36
39. W układzie energoelektronicznym zastosowano obwód drukowany o grubości wartswy miedzi 70 um i szerokości ścieżek 1 mm. Jakie maksymalne prądy mogą płynąć w tym urządzeniu:
5 A
Pytanie 37
40. W układzie falownika tranzystorowego zastosowano transoptor o współczynniku CMTI = 10 kV/us. Czy układ będzie odporny na zaburzenia elektromagnetyczne, jeżeli nastąpi komutacja tranzystora i w czasie 200 ns napięcie zmieni się o 1000 V:
będzie odporny na zaburzenie
będzie odporny dla transoptora o zmniejszonej wartości parametru CMTI
Pytanie 38
41. W przetwornikach a/c mikrokontrolerów DSP wartość wynikowa „0” przypisana jest zazwyczaj do polowy wartości napięcia zasilania:
możliwy jest pomiar napięć przemiennych ze standardowo określonym wynikiem w kodzie U2,
Pytanie 39
42. Dlaczego w układach transmisji danych stosujemy symetryczne nadajniki i odbiorniki linii:
umożliwiają realizację interfejsu RS485
Pytanie 40
43. W obrabiarce CNC zastosowano interpolator w układzie sterowania nadrzędnego i interfejs transmisji szeregowej o szybkości 9 600 bitów/s, prędkość skrawania wynosi 30 m/min, zaś dokładność obróbki ma wynosić 1 μm. Cykl pracy serwonapędu wynosi 100 μs. Oszacować czy poprawnie dobrano parametry sterowania:
Nie, zbyt wolna szybkość transmisji – nie zapewni dokładności obróbki