Twój wynik: Elektronika przemysłowa
Twój wynik
Wszystkie ({{dataStorage.userResults.answersTotal}})
Prawidłowe ({{dataStorage.userResults.answersGood}})
Błędne ({{dataStorage.userResults.answersBad}})
Pytanie 1
1. Przekształtniki ze wspomaganiem przełączenia przez obwody rezonansowe umożliwiają:
ograniczenie ilości elementów biernych,
zmniejszenie strat przewodzenia łączników,
zwiększenie częstotliwości przełączeń,
zmniejszenie poziomu zaburzeń elektromagnetycznych.
Pytanie 2
2. W układzie przetwornicy obniżającej napięcie z przełączaniem przy zerowym prądzie regulację napięcia wyjściowego uzyskuje się poprzez:
regulację czasokresu włączenia łącznika,
regulację czasokresu wyłączenia łącznika,
regulację częstotliwości włączenia łącznika,
przede wszystkim zmieniając obciążenie.
Pytanie 3
3. Podczas włączania tranzystora IGBT przy obciążeniu RL (prąd ciągły) z diodą zwrotną:
prąd kolektora Ic i napięcie Uce zmieniają się jednocześnie.
narasta prąd kolektora Ic, a następnie zmniejsza się napięcie Uce,
dopiero gdy napięcie Uce osiągnie wartość napięcia przewodzenia, zaczyna płynąć prąd kolektora Ic,
po zmniejszeniu się prądu diody zwrotnej do zera, zmniejsza się napięcie Uce,
Pytanie 4
4. W przetwornicy obniżającej napięcie (buck converter) częstotliwość graniczna filtru LC powinna być:
Porównywalna z częstotliwością przełączania przetwornicy,
dużo większa od częstotliwości przełączania przetwornicy,
znacznie mniejsza od częstotliwości przełączania przetwornicy.
trochę mniejsza od częstotliwości przełączania przetwornicy,
Pytanie 5
5. Tranzystory IGBT w inteligentnych modułach mocy zawierają typowo zabezpieczenia:
od obniżenia się napięcia zasilającego.
od przepięć w obwodzie zewnętrznym,
nadprądowe,
zwarciowe,
Pytanie 6
6. W celu zmniejszenia zaburzeń elektromagnetycznych w obwodach elektronicznych preferujemy zastosowanie:
blokowania zasilania układów scalonych kondensatorami elektrolitycznymi
separacji galwanicznej obwodów wejściowych,
zasilaczy z transformatorem sieciowym,
oddzielne prowadzenie ścieżek sygnałów analogowych i cyfrowych.
Pytanie 7
7. W celu właściwej ochrony styku przełączającego należy:
bezpośrednio przełączać obciążenie indukcyjne, gdyż w tym przypadku nie są wymagane układy ochrony,
przyłączyć diodę szeregowo do cewki indukcyjnej
ograniczyć szybkość narastania napięcia styku poniżej 1 V/μs
bezpośrednio przełączać obciążenie pojemnościowe, gdyż nie ma przyczyn uszkodzenia styków
Pytanie 8
8. W jakim układzie sterowania będzie prawidłowo pracował mikrokontroler, którego port PWM steruje inteligentnym modułem mocy ze sterownikiem bramkowym z przesuwaniem poziomu napięć sterujących:
w układzie z pośrednimi układami transoptorów lub transformatorów impulsowych separujących galwanicznie obwody portu PWM mikrokontrolera,
w układzie bezpośredniego połączenia portu PWM ze sterownikiem bramkowym i separacją galwaniczną obwodów wejściowych
w układzie z dodatkowymi filtrami dolnoprzepustowymi włączonymi pomiędzy portem PWM a sterownikiem bramkowym (przy braku filtrów - zaburzenia elektromagnetyczne z obwodu mocy mogłyby zakłócić pracę mikrokontrolera)
w układzie z dodatkowymi rezystorami włączonymi szeregowo pomiędzy linie portu PWM a sterownik bramkowy (rezystory ograniczają prądy w obwodzie sterowania, gdyż duża wartość napięcia obwodu mocy – przy połączeniach bezpośrednich - zniszczyłaby mikrokontroler),
Pytanie 9
9. Przetwornik obrotowo-impulsowy o 500 imp./obr przyłączono do interfejsu enkoderowego mikrokontrolera. Program obsługujący interfejs pracował w trybie multiplikacji impulsów. Wał enkodera obrócono o 4π rad a następnie cofnięto o 2π rad. O ile zmieni się zawartość licznika mikrokontrolera:
3000
500
2000
6000
Pytanie 10
10. Rezolwer wraz z układem przetwornika elektronicznego dostarcza informacji:
o wielkości obciążenia serwosilnika
tylko o prędkości kątowej
w postaci impulsów, których liczba określa przyrost położenia
o położeniu absolutnym i prędkości kątowej
Pytanie 11
11. W nowoczesnych układach serwonapędów stosujemy:
silniki prądu stałego z magnesami trwałymi
7-tranzystorowe inteligentne moduły mocy
mikrokontrolery typu DSP
silniki synchroniczne z magnesami trwałymi
Pytanie 12
12. W układzie serwonapędu zastosowano specjalizowany mikrokontroler sterujący i położeniowe sprzężenie zwrotne. Czy układ ten umożliwia:
wyłącznie regulację położenia
regulację położenia i prędkości
sterowanie w trybie zadawania momentu
regulację położenia, prędkości i przyspieszenia
Pytanie 13
13. W układzie serwonapędu zastosowano interfejs transmisji szeregowej. Jaki minimalny czas jest potrzebny do przesłania kodu - ON (załączenie napędu), jeżeli główne parametry interfejsu wynoszą: tryb pracy – asynchroniczny, kod - ASCII, szybkość 19200 b/s:
0,73 ms
1,5 ms
0,365 ms
1 ms
Pytanie 14
14. Dlaczego w układach sterowania serwonapędów stosujemy zadawanie wg krzywej „S”:
likwidujemy rezonanse mechaniczne maszyny
zmniejszamy przeregulowania wielkości regulowanych
poprawiamy jakość obróbki kształtowej
umożliwiamy zwiększenie wydajności maszyny
Pytanie 15
15. W układach sterowania numerycznego obrabiarek (CNC) zalecane są:
parametry cyklu zadawania kolejnego położenia – poniżej 1 ms oraz cykl regulatorów prądu – poniżej 5 ms.
zastosowania regulator położenia typu P z wysterowaniem wstępnym (Kvff),
zastosowanie regulatora położenia typu PID
parametry cyklu regulatorów prądu – poniżej 100 s oraz cykl zadawania kolejnego położenia – poniżej 500 us
Pytanie 16
16. W układzie przetwornicy obniżającej napięcie z przełączaniem przy zerowym prądzie warunkiem naturalnego wyłączenia łącznika jest, aby maksymalny prąd cewki rezonansowej:
był ponad dwa razy większy od prądu obciążenia,
był ponad dwa razy mniejszy od prądu obciążenia,
był równy prądowi obciążenia,
naturalne wyłączenie łącznika nie zależy od prądu obciążenia.
Pytanie 17
17. W układzie przetwornicy obniżającej napięcie z przełączaniem przy zerowym napięciu, regulację napięcia wyjściowego na obciążeniu uzyskuje się przez:
regulację czasookresu wyłączenia łącznika,
regulację częstotliwości wyłączenia łącznika,
regulację czasokresu włączenia łącznika,
przede wszystkim zmieniając obciążenie.
Pytanie 18
18. Podczas wyłączania tranzystora IGBT przy obciążeniu RL (prąd ciągły) z diodą zwrotną:
zmniejsza się prąd kolektora Ic, a następnie rośnie napięcie Uce,
dopiero gdy napięcie Uce osiągnie wartość napięcia znamionowego, zaczyna maleć prąd kolektora Ic,
dopiero gdy napięcie Uce osiągnie wartość napięcia znamionowego, dioda zwrotna zaczyna przewodzić prąd obciążenia
prąd kolektora Ic i napięcie Uce zmieniają się jednocześnie.
Pytanie 19
19. W przetwornicy podwyższającej napięcie (boost converter), zakładając bezstratny tryb pracy, średni prąd wejściowy przetwornicy jest równy:
wynika z równości mocy na wejściu i na wyjściu przetwornicy
średniemu prądowi cewki indukcyjnej,
średniemu prądowi cewki indukcyjnej i obciążenia,
średniemu prądowi obciążenia,
Pytanie 20
20. Inteligentne moduły mocy mogą zawierać:
prostownik, falownik oraz łącznik energoelektroniczny przeznaczony do hamowania dynamicznego,
prostownik, falownik, łącznik energoelektroniczny przeznaczony do hamowania dynamicznego oraz sterowniki tranzystorów,
prostownik i falownik z kondensatorem obwodu pośredniczącego,
falownik.
Pytanie 21
21. W transformatorze zasilającym zastosowano niezwarty zwój z folii miedzianej w celu:
zmiany pojemności między uzwojeniami transformatora przy ekranowaniu urządzenia elektronicznego
zmniejszenia zakłóceń sieciowych poprzez wprowadzenie ekranu elektrostatycznego,
ochrony przed skutkami uszkodzenia izolacji między uzwojeniami,
w celu umożliwienia równego nawinięcia uzwojenia transformatora
Pytanie 22
22. W celu zabezpieczenia styku przed dużymi prądami udarowymi (np. przy obciążeniu pojemnościowym) należy zastosować:
cewkę indukcyjną o małej rezystancji dla prądu stałego.
przełączalny rezystor ograniczający prąd,
diodę przyłączoną równolegle do odbiornika
układ RC dołączony na stykach przełącznika,
Pytanie 23
23. W celu zabezpieczenia styku stosujemy:
układ RCD przy obciążeniu indukcyjnym pobierającym prąd większy niż prąd łuku,
kondensator z cewką indukcyjną dołączony na stykach przełącznika,
nie jest wymagane zabezpieczenie styku przy obciążeniu nieindukcyjnym pobierającym prąd mniejszy niż prąd łuku,
cewkę indukcyjną o małej rezystancji dla prądu stałego.
Pytanie 24
24. Rezolwer jest przetwornikiem:
elektromechanicznym stosowanym m. in. w serwosilnikach
położenia absolutnego i prędkości kątowej
zwanym inaczej transformatorem położenia,
elektronicznym określającym przyrostową zmianę położenia
Pytanie 25
25. Transoptor liniowy:
działa w oparciu o diodę LED oraz fotodiodę sprzężenia zwrotnego i fotodiodę wyjściową,
umożliwia bezpośrednią separację sygnałów stało- i zmiennoprądowych
poprzez wyjściową charakterystykę logarytmiczną linearyzuje wejściową charakterystykę wykładniczą diody
składa się z diody LED i fototranzystora
Pytanie 26
26. Serwonapęd przeznaczony jest zwłaszcza do:
pracy przerywanej,
urządzeń o stałej prędkości obrotowej
napędów wentylatorów i pomp,
urządzeń automatyki o dużej dynamice ruchu,
Pytanie 27
27. Jakość pracy serwonapędu zwiększamy poprzez:
zwiększenie mocy rezystora hamowania do wartości większej od mocy silnika
zadawanie według krzywej „S”,
nastawę parametrów - możliwie największe dla członu D w regulatorach prądów i dla członu I w regulatorze położenia,
odpowiednie nastawy filtrów redukujących wpływ rezonansu mechanicznego,
Pytanie 28
28. W nowoczesnych obrabiarkach CNC stosujemy:
serwonapędy z regulatorami ze sprzężeniem w przód,
serwonapędy z regulacją położenia, prędkości przyspieszenia i udaru,
interpolację wielomianami wysokiego rzędu.
interpolację funkcjami sklejanymi,
Pytanie 29
29. Sieć komputerowa napędów sterowanych zazwyczaj zawiera:
interfejsy transmisji szeregowej RS232C,
Oprogramowanie umożliwiające sterowanie do kilku-tysięcy napędów,
specjalizowane interfejsy o szybkości transmisji rzędu 1Mbps.
interfejsy równoległe (np. 8 bitów - zwiększające szybkość transmisji),
Pytanie 30
30. W układach pomiaru położenia stosujemy optoelektroniczne przetworniki przyrostowe, gdyż:
w porównaniu z rezolwerami są odporne na drgania i udary,
nie są podatne na zakłócenia elektromagnetyczne (posiadają przetwornik optoelektroniczny, który jest odporny na zakłócenia)
mikrokontrolery posiadają odpowiednie interfejsy (liczniki),
multiplikacja sygnałów zwiększa dokładność pomiaru.
Pytanie 31
31. W układzie pomiaru położenia urządzenia technologicznego zastosowano przetworniki: absolutny i przyrostowy. Podczas ruchu urządzenia nastąpił zanik napięcia zasilającego enkodery. Jakie układy pomiarowe będą – po powrocie zasilania - prawidłowo wskazywały położenie:
tylko układ z enkoderem przyrostowym,
oba układy z przetwornikiem absolutnym i przetwornikiem obrotowo-impulsowym
tylko układ z enkoderem absolutnym,
żaden z układów.
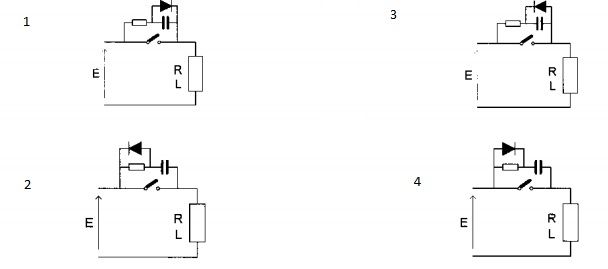
Pytanie 32
32. Który z układów charakteryzuje się największą skutecznością ochrony styku:
2
1
4
3
Pytanie 33
33. Które z sygnałów przedstawionych na rysunku są właściwymi przebiegami wyjściowymi A, B przetwornika obrotowo-impulsowego:
3
2
4
1

Pytanie 34
34. Dlaczego w serwonapędach stosujemy swobodnie programowalne układy wejścia/wyjścia:
umożliwiają budowę sterownika urządzenia technologicznego,
są niezbędne do sterowania silnikiem,
umożliwiają pracę serwonapędu w układach wielonapędowych
obsługują układy sprzężeń zwrotnych serwonapędu,
Pytanie 35
35. Jaką można przyjąć szybkość szeregowej transmisji danych do 4 serwonapędów połączonych w sieci pierścieniowej, jeżeli cykl zadawania położenia dla każdego z napędów wynosi 0,5 ms a informacja o położeniu wymaga przesłania 4 bajtów danych (odpowiedź uzasadnić):
Uzasadnienie:
4 bajty danych zadawania położenia i 4 bajty danych odpowiedzi daje 8 bajtów na jeden pełny cykl
Mamy 4 serwonapędy i jeden pełny cykl trwa 500us (0.5ms) więc 8*4/500u=64000bajty/sekunde
1 bajt=8 bitów, więc 64000*8=512bitow/s=0,5 Mb/s
115200 b/s
0,5 Mb/s
1 Mb/s
19200 b/s
Pytanie 36
39. W układzie energoelektronicznym zastosowano obwód drukowany o grubości wartswy miedzi 70 um i szerokości ścieżek 1 mm. Jakie maksymalne prądy mogą płynąć w tym urządzeniu:
100 A
0,01 A
100 mA
5 A
Pytanie 37
40. W układzie falownika tranzystorowego zastosowano transoptor o współczynniku CMTI = 10 kV/us. Czy układ będzie odporny na zaburzenia elektromagnetyczne, jeżeli nastąpi komutacja tranzystora i w czasie 200 ns napięcie zmieni się o 1000 V:
będzie odporny na zaburzenie
nie będzie odporny na zaburzenie
układ będzie zawsze odporny na zaburzenia, gdyż transoptor rozdziela masy obwodu sterowania i obwodu mocy
będzie odporny dla transoptora o zmniejszonej wartości parametru CMTI
Pytanie 38
41. W przetwornikach a/c mikrokontrolerów DSP wartość wynikowa „0” przypisana jest zazwyczaj do polowy wartości napięcia zasilania:
zwiększa się szybkość przetwarzania sygnałów analogowych
możliwy jest pomiar napięć przemiennych ze standardowo określonym wynikiem w kodzie U2,
umożliwiamy w ten sposób bezpośrednie podłączenie do wejścia napięciowego sygnału przemiennego
zwiększa się w ten sposób zakres pomiarowy,
Pytanie 39
42. Dlaczego w układach transmisji danych stosujemy symetryczne nadajniki i odbiorniki linii:
nie wymagają terminatorów linii
zwiększają odporność na zakłócenia wspólne
umożliwiają realizację interfejsu RS232
umożliwiają realizację interfejsu RS485
Pytanie 40
43. W obrabiarce CNC zastosowano interpolator w układzie sterowania nadrzędnego i interfejs transmisji szeregowej o szybkości 9 600 bitów/s, prędkość skrawania wynosi 30 m/min, zaś dokładność obróbki ma wynosić 1 μm. Cykl pracy serwonapędu wynosi 100 μs. Oszacować czy poprawnie dobrano parametry sterowania:
Tak, jest to standardowe rozwiązanie dla dużych szybkości skrawania
Nie, zbyt wysoka szybkość transmisji - zwiększa to podatność na zakłócenia
Nie, zbyt wolna szybkość transmisji – nie zapewni dokładności obróbki
Tak, dokładność obróbki będzie zapewniona ze względu na krótki cykl serwonapędu
Pytanie 41
44. W obwodach wejść/wyjść sterownika ruchu (serwonapędu) zalecane są:
długie przewody.
Separacja galwaniczna z transoptorami o dużym CMTI,
różnicowe nadajniki i odbiorniki linii,
Separacja galwaniczna ze standardowymi transoptorami,
Pytanie 42
45. W liniach transmisji sygnałów cyfrowych stosujemy terminatory:
likwidują odbicia i poprawiają jakość sygnału
ułatwiają wprowadzenie separacji galwanicznej
zabezpieczają przed skutkami przepięć
umożliwiamy w ten sposób prowadzenie lepszej transmisji danych w obwodzie niesymetrycznym
Pytanie 43
46. Jak zapobiegać występowaniu rezonansów mechanicznych w układzie serwonapędu:
wprowadzić minimalne wzmocnienia regulatora
zadawać wg. Krzywej S
zwiększyć wzmocnienia regulatora napędu
uaktywnić filtr pasmowy regulatora
Pytanie 44
47. Ile razy można zwiększyć dokładność pomiaru położenia z wykorzystaniem standardowego przetwornika obrotowo impulsowego?
3 razy
4 razy – 4 krotne zwiększenie rozdzielczości wymaga wykorzystanie zbocza narastającego i opadającego obu kanałów
2 razy – 2 krotna multiplikacja polega na wykorzystaniu zbocza narastającego i opadającego jednego z kanałów enkodera
nie można
Pytanie 45
48. W układzie serwonapędu zastosowano specjalizowany mikrokontroler sterujący i położeniowe sprzężenie zwrotne. Czy układ ten umożliwia:
regulację położenia, prędkości i przyspieszenia
regulację położenia i prędkości
sterowanie w trybie zadawania momentu
wyłącznie regulację położenia
Pytanie 46
49. W układzie regulacji stosujemy najczęściej regulatory typu
PI w ukł. regulacji prędkości
PID w ukł. regulacji momentu
PI w ukł. regulacji momentu (prądu)
PD w układzie regulacji momentu (prądu)
Pytanie 47
W układzie regulacji stosujemy najczęściej regulatory typu:
PID-w układzie regulacji momentu(prądu) P-w układzie regulacji prędkości P-w układzie regulacji położenia
PI-w układzie regulacji momentu(prądu) PID- w układze regulacji prędkości P- w układzie regulacji położenia
PI-w układzie regulacji momentu(prądu) PI-w układzie regulacji prędkości P-w układzie regulacji położenia
P-w układzie regulacji momentu(prądu) PI- w układze regulacji prędkości PID- w układzie regulacji położenia
Pytanie 48
W układach sterowania numerycznego obrabiarek (CNC) zalecane są:
Zastosowania regulator położenia typu P z wysterowaniem wstępnym (Kvff)
Prostownik, falownik oraz łacznik energoelektroniczny przeznaczony do ham. Dyn oraz sterowniki tranzystorów
Zastosowanie regulatora położenia typu PID
parametry cyklu regulatorów prądu- poniżej 100μs oraz cykli zadawania kolejnego polożenia – poniżej 500.
Pytanie 49
Przekształtniki ze wspomaganiem przełączenia przez obwody rezonansowe
umożliwiają:
zmniejszenie poziomu zaburzeń elektromagnetycznych.
zmniejszenie_strat przewodzenia łączników,
zwiększenie częstotliwości przełączeń,
ograniczenie ilości elementów biernych,
Pytanie 50
W celu właściwej ochrony styku przełączającego należy:
bezpośrednio przyłączać obciążenie pojemnościowe, gdyż nie ma przyczyn uszkodzenia styków
przyłączyć diodę szeregowo do cewki indukcyjnej
ograniczyć szybkość narastania napięcia styku poniżej 1 V/μs
bezpośrednio przełączać obciążenie indukcyjne, gdyż w tym przypadku nie są wymagane układy ochrony
Pytanie 51
W układzie przetwornicy obniżającej napięcie z przełączaniem przy zerowym
napięciu ZVS, warunkiem naturalnego wyłączenia łącznika jest, aby maksymalny
prąd kondensatorze rezonansowym:
było równe napięciu wejściowemu,
było ponad dwa razy większe od napięcia wejściowego,
włączenie łącznika nie zależy od napięcia wejściowego.
było ponad dwa razy mniejsze od napięcia wejściowego,
Pytanie 52
Dlaczego w rozległych liniach transmisji stosujemy rezystory włączone pomiędzy
masę sygnałową a uziemienie:
zabezpieczają przed skutkami przepięc
likwidują odbicia i poprawiają jakość sygnału
ograniczają wartość prądu pomiędzy masami
zmniejszają potrzebną moc transmitowanych sygnałów
Pytanie 53
Zastosowanie ruchu w układach serwonapędowych:
przyspiesza projektowanie serwonapędów
obniża koszty opracowania serwonapędów dla małych serii produkcyjnych
pozwala na stosowanie modyfikacji programowych sterowania silnikiem
uwalnia projektanta od znajomości złożonych algorytmów sterowania
Pytanie 54
W układach sterowania kształtowego możemy stosować serwonapędy o parametrach:
czas po którym można zapisywać kolejne położenie nie powinien być dłuższy niż 500us
czas po którym można zapisywać kolejne położenie nie powinien być dłuższy niż 500ms
czas realizacji obliczeń w pętli regulatorów prądu nie powinien przekraczać 10us
czas realizacji obliczeń w pętli regulatorów prądu nie powinien przekraczać 100us
Pytanie 55
W układzie sterowania serwonapędu stosujemy:
regulator prądu P i regulator położenia PD
regulator prędkości PI, regulator prądu PID
regulator prędkości PID, regulator prądu PI
regulator PID z wysterowaniem wstępnym (feed forward)
Pytanie 56
Dlaczego przy nożkach zasilających cyfrowe układy scalone dołączamy kondensatory-elektrolityczny i ceramiczny:
nie stosujemy polaczenia ani szeregowego ani rów noległego-stosujemy superkondensatory
zmniejszamy zaburzenia napiecia zasilania
łączymy szeregowo w celu zmniejszenia wplywu indukcyjnosci obwodu zasilania
laczymy rownolegle w celu zapewnienia malej impedancji
Pytanie 57
Rezolwer wraz z układem przetwornika elektronicznego dostarcza informacji:
w postaci impulsów, których liczba określa przyrost położenia,
o wielkości obciążenia serwosilnika.
tylko o prędkości kątowej,
o położeniu absolutnym i prędkości kątowej,
Pytanie 58
W układzie falownika tranzystorowego zastosowano transoptor o współczynniku CMTI = 5 kV/μs.
Czy układ będzie odporny na zaburzenia elektromagnetyczne, jeżeli nastąpi komutacja tranzystora i w
czasie 200 ns napięcie zmieni się o 500 V:
nie będzie odporny na zaburzenie, gdyż transoptory stosuje się tylko w obwodach transmisji sygnałów o napięciach do kilkunastu woltów.
nie będzie odporny - wymagany jest transoptora o wyższej wartości parametru CMTI
układ będzie zawsze odporny na zaburzenia, gdyż transoptor galwanicznie rozdziela obwód sterowania od obwodu mocy,
dla podanych parametrów transoptor będzie odporny na zaburzenie,
Pytanie 59
Jak zapobiegać występowaniu rezonansów mechanicznych w układzie serwonapędu:
Zadawać wg krzywej S
Uaktywnić filtr pasmowy regulatora
Zwiększyć wzmocnienia regulatora napędu
Wprowadzić minimalne wzmocnienia regulatora
Pytanie 60
W układach sterowania kształtowego możemy stosować serwonapędy o parametrach:
czas, po którym można zapisywać kolejne położenie nie powinien być dłuższy niż 500 us
czas realizacji obliczeń w pętli regulatorów prądu nie powinien przekraczać 100 us
czas, po którym można zapisywać kolejne położenie nie powinien być dłuższy niż 500 ms
czas realizacji obliczeń w pętli regulatorów nie prądu powinien przekraczać 10 us
Pytanie 61
Specjalizowane porty mikrokontrolerów obsługują:
Wielkości analogowe prądów i napięć
Enkodery pomiarowe położenia kątowego
Zasilanie trójfazowe mocy
Generatory PWM do sterowania trójfazowych falowników
Pytanie 62
Wielopulsowe prostowniki trójfazowe stosujemy:
W celu zwrotu energii do sieci zasilającej
Układach dużej mocy
W prostownikach bardzo małej mocy
W celu eliminacji trafo w obwodzie DC
Pytanie 63
Komutacja „miękka” w przekształtnikach DC/DC charakteryzuje się:
Pogorszeniem właściwości dynamicznych przekształtników
Minimalizacja zaburzeń ektromagnetycznych
Większą częstotliwością pracy łączników
Zwiększeniem mocy strat łączników
Pytanie 64
Na jakiej drodze sprzężeń mogą przenosić się zaburzenia w obwodach sterowania urządzeń energoelektronicznych:
fal świetlnych w obwodach transoptora i światłowodu
przewodzonych, pojemnościowych i indukcyjnych
tylko indukcyjnych
pojemnościowe poprzez kondensatory odsprzęgające
Pytanie 65
Jakie dodatkowe elementy oprócz diody i tranzystora niezbędne są w celu realizacji przekształtnika typu ZCS:
obwód rezonansowy o dużej rezystancji
cewka i kondensator
kondensator
rezystor
Pytanie 66
Bezprzewodowe zasilanie w systemie IPT charakteryzuje się:
dostarczenie energii elektrycznej z użyciem kabli elektroenergetycznych
niską sprawnością energetyczną i małą wartością przesyłanej mocy
dużą sprawnością energetyczną i stosunkowo wysoką wartością przesyłanej mocy
wymaganą bardzo małą szczeliną powietrzną między cewkami
Pytanie 67
Dostęp do kanału transmisyjnego sieci WSN jest realizowany przez:
sieć w standardzie BeeZig
sieć CAN
wielodostęp z podziałem w czasie, czyli TMDA
dostęp swobodny - urządzenia mogą transmitować w dowolnej chwili czasu, rywalizując o dostęp do kanału czyli CSMA/CA
Pytanie 68
Bezprzerwowe sieci sensorowe charakteryzują się :
energooszczedną pracą węzłów
duży zasięg łączności
nie tolerują błędów
zastosowaniem dużej liczy koordynatorów
Pytanie 69
W serwonapędach stosujemy sprzężenie zwrotne od:
momentu obrotowego
położenia kątowego wału silnika
położenia prędkości i zrywu
położenia, prądów i napięcia obwodu pośredniego
Pytanie 70
W sieciach ZigBee stosujemy:
węzły o dużej mocy modułu radiowego w celu uzyskania znacznego zasięgu łączności
energooszczędne działanie modułów
wyłącznie zasilanie z typowej sieci elektroenergetycznej 230V 50 Hz
urządzenia końcowe, routery i moduł koordynatora
Pytanie 71
Bezstykowy przesył energii na drodze indukcyjnej umożliwia:
przesył energii o dużych mocach(kilkadziesiąt i więcej kilowatów) w szczelinach powietrznych rzędu kilku mm
przesył energii o dużych mocach(kilkadziesiąt i więcej kilowatów) w szczelinach powietrznych rzędu kilku m
przesył energii o dużych mocach(kilkadziesiąt i więcej kilowatów) w szczelinach powietrznych rzędu kilku cm
przesył energii tylko o niewielkiej mocy rzędu kilkudziesięciu watów ze względu na niską sprawność
Pytanie 72
Dlaczego w algorytmie regulatora cyfrowego PID ograniczamy wartość sygnału członu całkującego i wartość sygnału wyjściowego:
skracamy czas regulacji
zbyt duża wartość tych sygnałów spowodowałaby zbyt szybką regulacje
zbyt duże wartości powodowałyby uszkodzenie urządzeń wykonawczych
umożliwia to lepszą aproksymację obliczenia pochodnej uchybu regulacji (w członie D)
Pytanie 73
W układach pomiaru położenia stosujemy optoelektroniczne przetworniki przyrostowe gdyż:
nadajniki i odbiorniki linii oraz filtry cyfrowe w interfejsach enkoderowych zwiększają odporność na zaburzenia elektromagnetyczne
w porównaniu z rezolwerami są odporne na drgania i udary
w porównaniu z rezolwerami mogą pracować w wysokich temperaturach
interfejs enkodera w trybie multiplikacji zwiększa 4 razy dokładność pomiaru
Pytanie 74
Ze względu na zastosowania sieci bezprzewodowe dzielimy na:
firmowe, prywatne, taktyczne, sensorowe, wifi
prywatne, publiczne, taktyczne, sensorowe
publiczne, prywatne, wojskowe, sensorowe
publiczne, prywatne, militarne, bezczujnikowe WSN
Pytanie 75
Skrętka do transmisji może przewodzić prąd o wartości około:
4 parowa skrętka sumarycznie do 10 A
1 para przewodów do 0,1 A
4 parowa skrętka sumarycznie do 3,3 A
1 para przewodów do 1 A